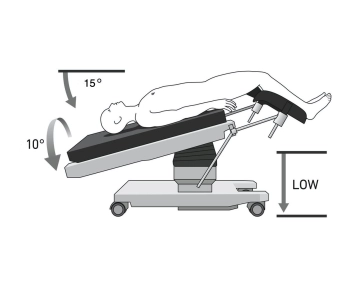
Se almacena en posición de litotomía sobre un gran cojín de vacío. Apoyo de ambos brazos (cave: envoltura de algodón al apoyar mediante lazo de tela). En el lado derecho, el cojín soporta el arco costal y la cresta ilíaca, para que el peso del paciente en posición lateral derecha no presione el brazo. Posicionamiento de las piernas en „boots“ acolchados/uso de „swan-fins“ para las piernas, para que las piernas puedan moverse por separado y cubiertas estérilmente si es necesario. Alternativamente: Posicionamiento de las piernas en soportes para piernas con fijación de las piernas en estos. Envoltura de algodón de las rodillas y las pantorrillas proximales. Las piernas deberían poder flexionarse y extenderse mediante el control de la mesa de operaciones
Nota: El posicionamiento adquiere una importancia especial debido al acoplamiento del paciente al manipulador del robot. Riesgo de lesión de la pared abdominal si el paciente se desliza.
Precaución: Los cojines de vacío pueden tener fugas. Verificar nuevamente antes de la cobertura estéril.